1、什么是步进电机?
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装。自动化设备上也常用步进电机。
2、步进电机的特点
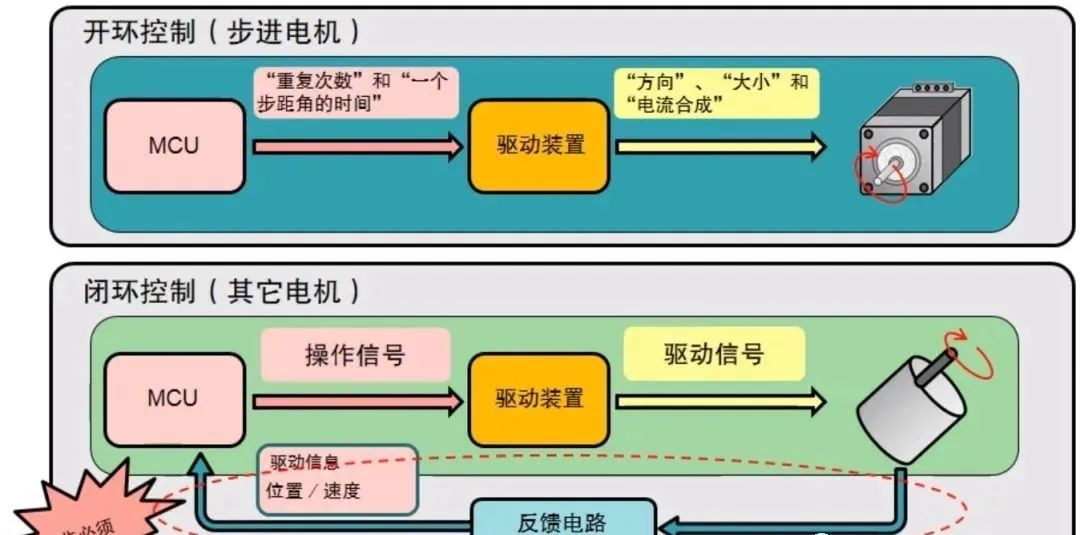
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。步进电机低速状态下具有良好的扭矩特性。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。优缺点如下所示。
优点
1. 电机操作易于通过脉冲信号输入到电机进行控制;
2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);
3. 由于没有接触电刷而实现了更大的可靠性。
缺点
1. 需要脉冲信号输出电路;
2. 当控制不适当的时候,可能会出现同步丢失;
3. 由于在旋转轴停止后仍然存在电流而产生热量。
4.低速容易有电流磁致噪声
针对步进电机的一些缺点,德国Trinamic电机驱动芯片专门对此作出优化,拥有StealthChop低速超静音、SpreadCycle高速抑制共振的专利技术。
可以使步进电机更静音、更平稳地运行。
1、什么是步进电机?
步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。
步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率,来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装。自动化设备上也常用步进电机。
2、步进电机的特点
步进电机工作时的位置和速度信号不反馈给控制系统,如果电机工作时的位置和速度信号反馈给控制系统,那么它就属于伺服电机。
相对于伺服电机,步进电机的控制相对简单,但不适用于精度要求较高的场合。步进电机低速状态下具有良好的扭矩特性。
步进电机的优点和缺点都非常的突出,优点集中于控制简单、精度高,缺点是噪声、震动和效率,它没有累积误差,结构简单,使用维修方便,制造成本低。
步进电机带动负载惯量的能力大,适用于中小型机床和速度精度要求不高的地方,缺点是效率较低、发热大,有时会“失步”。优缺点如下所示。
优点
1. 电机操作易于通过脉冲信号输入到电机进行控制;
2. 不需要反馈电路以返回旋转轴的位置和速度信息(开环控制);
3. 由于没有接触电刷而实现了更大的可靠性。
缺点
1. 需要脉冲信号输出电路;
2. 当控制不适当的时候,可能会出现同步丢失;
3. 由于在旋转轴停止后仍然存在电流而产生热量。
4.低速容易有电流磁致噪声
针对步进电机的一些缺点,德国Trinamic电机驱动芯片专门对此作出优化,拥有StealthChop低速超静音、SpreadCycle高速抑制共振的专利技术。
可以使步进电机更静音、更平稳地运行。

3、步进电机的特点
在选择步进电机时可以按以下步骤进行选择,这样可以避免选型不当带来的麻烦。具体如下,仅供参考。
1) 步进电机转矩的选择
步进电机的保持转矩,近似于传统电机所称的“功率”。当然,有着本质的区别。
步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的电机。
大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m左右的,选择57电机较为合适。
扭力在几个N.m或更大的情况下,就要选择86、110、130等规格的步进电机。

2) 步过电机转速的选择
对于电机的转速也要特别考虑。因为,电机的输出转矩,与转速成反比。
就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩(1000转/分--9000转)就很小了。
当然,有些工况环境需要高速电机,就要对步进电动机的线圈电阻、电感等指标进行衡量。
选择电感稍小一些的电机,作为高速电机,能够获得较大输出转矩。反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。
3)步进电机空载起动频率的选择
步进电机空载起动频率,通常称为“空起频率”。这是选购电机比较重要的一项指标。
如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右(或更高),通常需要“加速启动”。
如果需要直接启动达到高速运转,最好选择反应式或永磁电机。这些电机的“空起频率”都比较高。

4)步进电机的相数选择
步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。其实,不同相数的电机,工作效果是不同的。
相数越多,步距角就能够做的比较小,工作时的振动就相对小一些。
大多数场合,使用两相电机比较多。在高速大力矩的工作环境,选择三相步进电机是比较实用的。
5)针对步进电机使用环境来选择
特种步进电机能够防水、防油,用于某些特殊场合。例如水下机器人,就需要放水电机。对于特种用途的电机,就要针对性选择了。

6) 根据您的实际情况可否需要特殊规格
特殊规格的步进电机,在技术允许的范围内,加工订货。例如,出轴的直径、长短、伸出方向等。
7)如有必要最好与厂家的技术工程师进一步沟通与确认型号
如有必要最好与技术工程师进一步沟通,以便于确认你要选择的步进机电能否满足你所要求各方面的指标。
欢迎大家一起沟通交流。
3、步进电机的特点
在选择步进电机时可以按以下步骤进行选择,这样可以避免选型不当带来的麻烦。具体如下,仅供参考。
1) 步进电机转矩的选择
步进电机的保持转矩,近似于传统电机所称的“功率”。当然,有着本质的区别。
步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的电机。
大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m左右的,选择57电机较为合适。
扭力在几个N.m或更大的情况下,就要选择86、110、130等规格的步进电机。
2) 步过电机转速的选择
对于电机的转速也要特别考虑。因为,电机的输出转矩,与转速成反比。
就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩(1000转/分--9000转)就很小了。
当然,有些工况环境需要高速电机,就要对步进电动机的线圈电阻、电感等指标进行衡量。
选择电感稍小一些的电机,作为高速电机,能够获得较大输出转矩。反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。
3)步进电机空载起动频率的选择
步进电机空载起动频率,通常称为“空起频率”。这是选购电机比较重要的一项指标。
如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右(或更高),通常需要“加速启动”。
如果需要直接启动达到高速运转,最好选择反应式或永磁电机。这些电机的“空起频率”都比较高。
4)步进电机的相数选择
步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。其实,不同相数的电机,工作效果是不同的。
相数越多,步距角就能够做的比较小,工作时的振动就相对小一些。
大多数场合,使用两相电机比较多。在高速大力矩的工作环境,选择三相步进电机是比较实用的。
5)针对步进电机使用环境来选择
特种步进电机能够防水、防油,用于某些特殊场合。例如水下机器人,就需要放水电机。对于特种用途的电机,就要针对性选择了。
6) 根据您的实际情况可否需要特殊规格
特殊规格的步进电机,在技术允许的范围内,加工订货。例如,出轴的直径、长短、伸出方向等。
7)如有必要最好与厂家的技术工程师进一步沟通与确认型号
如有必要最好与技术工程师进一步沟通,以便于确认你要选择的步进机电能否满足你所要求各方面的指标。
欢迎大家一起沟通交流。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

